Как выполняется уравнивание сегодня
Раньше все расчеты выполнялись вручную, а в некоторых случаях с использованием специальных ЭВМ, которые по своим мощностям никак нельзя сравнить с современными компьютерами. Это имело ряд существенных недостатков, начиная с того, что все результаты хранились исключительно в бумажном виде и занимали большое количество времени.
Сегодня обработка измерений стала куда менее трудоемкой задачей. Специалисту достаточно только ввести необходимые переменные, выбрать способ обработки, внеся ряд коррективов, чтобы результат был рассчитан программой.
Однако геодезисту все равно необходимо знать все способы проведения работ, даже если они в настоящее время они не применяются на практике. В этом и состоит его ценность как квалифицированного специалиста, который может выполнить работы даже в случае возникновения непредвиденных обстоятельств, от которых не застрахованы ни на одном производстве.
Обработка полученных результатов измерений
Выполнение контурной съемки проводится с целью получения данных, необходимых для дальнейшего расчета координат:
– горизонтальных углов;
– длин сторон теодолитного хода;
– дирекционных углов;
– румбов.
Подсчет теоретической суммы угловых измерений () хода осуществляют по формуле (табл. 3).
Таблица 3.
| замкнутый | разомкнутый |
| \(\beta _{T}= 180\left ( n-2 \right )\) | \(\beta _{T}=\left ( \alpha _{р}+\alpha _{к} \right )\pm 180^{o}\cdot \left ( n+1 \right )\) |
n – количество точек;
\(\alpha _{н}\)– значение начального дирекционного угла, –конечного;
Далее производят расчет угловой невязки:
\(f_{\beta }=\sum \beta _{изм}- \sum \beta _{т}\)
\(\beta _{изм}\)– сумма измеренных углов.
Следующим шагом будет сравнение \(f_{\beta }\)с допуском \(f_{\beta доп}\). Если результат не соответствует приведенному ниже выражению, необходимо перепроверь данные:
\(f_{\beta}< f_{\beta доп}\)
\(f_{\beta доп}={1,5·t}\sqrt{n}\), где t – приборная точность измерения углов; n – количество измеряемых углов.
В дальнейшем \(f_{\beta}\) равномерно распределяется между измеренными величинами с противоположным знаком и проводится расчет поправки измеренных углов (\(\delta _{\beta }\)):
\(\delta _{\beta} = – \frac{f_{\beta }}{n}\)
При правильном выполнении расчетов сумма поправок будет иметь отрицательное значение:
\(\sum \delta _{\beta }=-f_{\beta }\)
Далее следует вычисление дирекционного угла (α), который начинают отчитывать от северного направления осевого меридиана по часовой стрелке.
\(\alpha _{n}=\alpha _{n-1}+180^{o}-\beta _{пр.исп}\)
\(\alpha _{n}=\alpha _{n-1}-180^{o}+\beta _{л.исп}\)
В данном выражении \(\alpha _{n-1}\)– дирекционный угол предыдущей точки, \(\alpha _{n}\)– последующей.
\(\beta _{пр.исп}\)– исправленное значение правого по ходу угла, \(\beta _{л.исп}\)– исправленное значение левого по ходу угла.
Начальный α должен равняться конечному. Если же полученный α больше 360°, то перед тем, как занести показатели в журнал из них вычитают 360°.
Теперь вычисляется румб (r), который отсчитывают от самого близкого окончания осевого меридиана до ориентированной линии. Рассчитывается в зависимости от своего местоположения относительно четверти координат (табл. 4).
Таблица 4. Формула румба для каждой четверти.
| Четверть и ее название | Пределы α | Формула | Знаки приращения координат | |
| ΔХ | ΔУ | |||
| 1 С.В. | 0° – 90° | r = α | + | + |
| 2 Ю.В. | 90°-180° | r = 180° – α | – | + |
| 3 Ю.З. | 180°-270° | r = α – 180° | – | – |
| 4 С.З. | 270°-360° | r = 360° – α | + | – |
Приращение геодезических координат определяют:
\(X = d · cos(r)\)
\(Y = d · sin(r)\)
где: d – горизонтальное проложение;
r – румб стороны.
Уравнивание проводят при помощи приведенных ниже формул:
\(f_{\Delta X}=\sum \Delta X_{B}-\sum \Delta X_{T}\)
\(f_{\Delta Y}=\sum \Delta Y_{B}-\sum \Delta Y_{T}\)
\( \sum \Delta X_{B}\) и \(\sum \Delta Y_{B}\)– сумма приращений координат, которые были определены с учетом знаков;
\(\sum \Delta X_{T}\) и \(\sum \Delta Y_{T}\) – теоретическая сумма приращения значений координат.
Стоит отметить, что в замкнутом полигоне последние значение равняются нулю, поэтому невязки должны быть равны сумме приращений или приближенными к нему.
Проверка условия допустимости:
1. Абсолютного значения:
\(f_{абс}=\sqrt{f\Delta X^{2}+f\Delta Y^{2}}\)
2. Относительного:
\(f_{отн}=\frac{f_{абс}}{P}\)
где Р – периметр хода (сумма его горизонтальных проложений).
Условие допустимости:
\(\left | f_{отн} \right |\leq \left | f_{абс} \right |\)
Невязки раскидывают с обратным знаком, предварительно выполнив поправки на приращение каждой стороны при помощи таких формул:
\(\delta X_{\imath }=\frac{f_{x}\cdot d_{\imath }}{P}\)
\(\delta Y_{\imath }=\frac{f_{\Delta y}\cdot d_{\imath }}{P}\)
\(\imath\) – номер точки;
Все координаты вершин рассчитываются таким образом:
\(X_{n}=X_{n-1}+\Delta X_{n-1(исп)}\)
\(Y_{n}=Y_{n-1}+\Delta Y_{n-1(исп)}\)
Обработка результатов измерений
Мало знать точки, может произойти невязка. Для качественного выполнения полевой работы необходимо знать углы, с помощью которых строится то или иное пространство.

Для начала составляют проект, от которого будут отталкиваться на местности, часто это делается онлайн. Вычисление координат геодезических обоснований – важный шаг в работе.
Чтобы качественно обработать полученные результаты измерений, необходимо:
-
Составить таблицу с полученными углами.
-
Выписать точки начала и конца.
-
С помощью различных формул вычисляется сумма углов, а также длина. Расчет оформляется на отдельном полотне.
-
Далее необходимо вычислить теоретическую сумму для того, чтобы составить верное построение. Для каждого построения свои формулы.
Уравнивание
При начале расчетов определяют теоретическую сумму углов , а потом увязывают их, распределяя между ними угловую невязку.
\(\sum \beta _{теор}=180^{\circ}\cdot (n-2)\)
n- количество точек полигона;
\(f_{\beta }=\sum \beta _{изм}-180^{\circ}\cdot (n-2)\)
\(\sum \beta _{изм}\)– значение измеренных угловых величин;
Для получения \(f_{\beta }\), необходимо рассчитать разность между \(\beta _{изм}\), в которой присутствуют погрешности, и \(\sum \beta _{теор}\).
В уравнивании \(f_{\beta }\) выступает как показатель точности проведенных измерительных работ, а ее значение не должно быть выше предельной величины, определяемой из следующей формулы:
\(f_{\beta 1}=1,5t\sqrt{n}\)
t-точность измерительного устройства,
n – количество углов.
Уравнивание заканчивается равномерным распределением полученной невязки между угловыми величинами.
Вычисление отметок реперов разомкнутого хода технического нивелирования
По точности измерения превышений различают нивелирование 1, 2, 3, 4 классов и техническое. При техническом нивелировании предельная ошибка измерения превышения на 1 км хода не должна превышать 50 мм; это соответствует средней квадратической ошибке 20 мм на 1 км хода. Для нивелирования 1, 2, 3 и 4 классов средняя квадратическая ошибка измерения превышения на 1 км хода равна 0.8 мм, 2.0 мм, 5 мм и 10 мм соответственно.
Ходы технического нивелирования прокладывают между реперами с известными отметками (реперами нивелирования 1, 2, 3, 4 классов); допустимая длина хода зависит от его формы. Так, длина разомкнутого (рис.4.37-а) или замкнутого (рис.4.37-б) хода может достигать 16 км; длина висячего хода (рис.4.37-в) не должна превышать 8 км. В разомкнутом и замкнутом ходах нивелирование выполняют один раз, в висячем ходе – два раза: в прямом и обратном направлениях. При проектировании ходов следует выбирать наиболее удобные для нивелирования пути: дороги, просеки в лесу, берега рек, участки с небольшим уклоном и твердым грунтом.
Рис.4.37
Часть хода между двумя соседними реперами, закрепленными на местности, называется секцией. Длину секции определяют суммированием расстояний от нивелира до реек, которые можно измерять по нитяному дальномеру или шагами. Превышения по секции получают как суммы превышений на станциях секции.
Обозначим в разомкнутом нивелирном ходе:
n – количество секций (количество измеренных превышений),
hi – превышение по i-той секции,
li – длина i-той секции,
L – длина хода (L = li),
ki – количество станций в i-той секции,
K – количество станций в ходе (K = ki),
HA – отметка исходного репера в начале хода,
HB – отметка исходного репера в конце хода.
Количество реперов с неизвестными отметками равно (n-1), т.е. в ходе имеется одно избыточное измерение, которое порождает одно геометрическое условие, и, следовательно, вычисление отметок необходимо выполнять методом уравнивания.
Запишем формулы для последовательного вычисления отметок реперов хода:
H1 = HA + h1,
H2 = H1 + h2,
. . . . . . .,
Hn-1 = Hn-2+ hn-1,
HB = Hn-1+ hn.
Сложим эти уравнения и получим:
(H1 + H2 + … + Hn-1) + HB = HA + (H1 + H2 + … + Hn-1) + h
или
HB = HA + h,
откуда
h = HB – HA. (4.60)
Формула (4.60) представляет собой математическую запись условия, существующего в разомкнутом нивелирном ходе: сумма превышений по секциям должна быть равна разности отметок конечного и начального исходных реперов. Сумму превышений, подсчитанную по формуле (4.60), называют теоретической суммой.
Сумма измеренных превышений в общем случае не равна теоретической сумме; их разность называется невязкой хода и обозначается fh:
fh = h – hизм . (4.61)
Невязка нивелирного хода характеризует нарушение условия (4.60) вследствие ошибок измерений. Значение допустимой невязки по Инструкции равно:
(4.62)
или
(4.63)
При fh < fhдоп вычисляют поправки в измеренные превышения по формулам:
(4.64)
или
(4.65)
при этом нужно, чтобы выполнялся контроль:
Vhi = – fh . (4.66)
По исправленным превышениям hiиспр = hi + Vhi вычисляют отметки реперов хода. Заключительным контролем правильности вычислений является получение в конце хода отметки конечного исходного репера.
Рекомендовать Google:
Построение профиля трассы
_______По полученным отметкам строится профиль трассы. При построении профиля наносятся в определенном порядке все пикеты и промежуточные точки. Против каждой точки по вертикали откладываются их отметки.
_______Профилем называется изображение на бумаге в уменьшенном виде вертикального разреза местности.
_______Для того чтобы изображение рельефа на профиле было более выразительным, масштаб вертикальных расстояний делается в 10 раз крупнее масштаба горизонтальных. Порядок построения профиля и методика проектирования по профилю будут рассмотрены на лабораторных занятиях.
Приращение координат и их увязка
Приращением называют величины, на которые будут увеличены координаты предыдущей точки для вычисления последующей. В основу этих расчетов берется уже знакомая формула прямой задачи:
\(\Delta X=d\cdot cos \alpha \)
\(\Delta Y=d\cdot sin \alpha \)
Полученные значения также необходимо уровнять, чтобы равномерно распределить погрешности и получить наиболее точный результат. Начинают расчеты с определения невязок. Поскольку сумма проекций в сторонах многоугольной замкнутой фигуры равняется нулю, для вычисления невязок пунктов замкнутого хода используют следующую формулу:
\(f_{X}=\sum \Delta X_{выч}-\sum \Delta X_{теор};\sum \Delta X_{теор}=0\)
\(f_{Y}=\sum \Delta Y_{выч}-\sum \Delta Y_{теор};\sum \Delta Y_{теор}=0\)
\(\sum \Delta X_{выч},\sum \Delta Y_{выч}\) – суммы приращений, рассчитанные с учетом знаков для замкнутого и разомкнутого хода;
\(\sum \Delta X_{теор},\sum \Delta Y_{теор}\) – теоретические суммы приращений.

Вследствие влияния погрешностей на ход, он будет разомкнут на величину , которая представляет собой абсолютную невязку в его периметре. По этому причине проверяется соответствие условию допустимости его невязок.
- Абсолютное значение:
\(f_{p}=\sqrt{f_{x}^2+f_{y}^2}\)
- Относительное
\(f_{отн}=\frac{f_{абс}}{P}\)
P – периметр хода, полученный суммированием всех его сторон.
Допустимая невязка должна удовлетворять условие 1/2000, а при соответствии выражению \(|f_{отн}|\leq |f_{доп}|\) выполняют ее распределение с противоположным знаком. Однако перед этим рассчитывают поправки приращений, которые определяют для каждой стороны:
\(\delta _{x_{i}}=-\frac{f_{x}d_{i}}{P}\);\(\delta _\Delta {y_{i}}=-\frac{f_{y}d_{i}}{P}\)
\(\delta _{x_{i}},\delta _{y_{i}}\)– значения поправок в приращениях.
Чтобы упростить дальнейшие расчеты поправки, необходимо округлить их до 0,01 м.
Для разомкнутого хода за теоретическую сумму приращений берется разность между двумя соседними точками.
\(f_{X}=\sum \Delta X_{выч}-\sum \Delta X_{теор}; \sum \Delta X_{теор}=x_{B}-x_{A}\)
\(f_{Y}=\sum \Delta Y_{выч}-\sum \Delta Y_{теор}; \sum \Delta Y_{теор}=y_{B}-y_{A}\)
Для обоих ходов поправки имеют противоположный приращению знак. Уравнивание выполнено верно, если сумма исправленных приращений равна или максимально приближена к нулю.
Порядок внесение данных в ведомость
Изучим более подробно данный документ и порядок его заполнения. Чтобы лучше разобраться в этом вопросе рассмотрим его на примере теодолитного хода, изображённого на рис. 2.
Рисунок 2. Схема разомкнутого теодолитного хода
После первичной камеральной обработки координаты точек, ориентирные и измеренные горизонтальные углы, а также расстояния между ними будут занесены в ведомость. На рис. 3. наглядно изображено, как она будет выглядеть в заполненном виде.
Стоит отметить, что в зависимости от технического задания и вида геодезических работ, ее оформление может отличаться, а некоторые величины отсутствовать или же наоборот.
Рисунок 3. Заполненная таблица ведомости вычисления координат теодолитного хода
Разберем каждую графу в данном документе по порядку его заполнения:
- Первая графа предназначена для снимаемых пунктов, которые нужно внести в бланк по порядку их возрастания.
- Координаты исходных точек должны быть записаны в раздел координат, под номерами 15 и 16. Он находится в самом конце таблицы.
- Начальные и конечные дирекционные углы (4) и румбы (5) вносят в одноименные столбцы.
- Второй раздел ведомости отведен под измеренные углы точек теодолитного хода.
- Далее следует горизонтальное проложение, которое определяется при помощи формул:
\(D=d\cdot cos\nu \)
\(D^{2}=d^{2}-h^{2} \)
Рисунок 4. Начальные данные в ведомости
Потом идет определение невязок и ориентирных углов в такой последовательности:
- Определить сумму измеренных углов \(\sum \beta _{изм}\).
- Вычислить и занести в таблицу \(\sum \beta _{теор}\), применив следующее выражение:
\(\sum \beta _{теор}=(\alpha _{н}-\alpha _{к})-180^{\circ}\cdot n\)
\(\alpha _{н},\alpha _{к}\), – конечный и начальный дирекционный угол;
n – количество точек хода. - Обозначенная в таблице формула \(f_{\beta}=\sum \beta _{изм}-\sum \beta _{теор}\)– угловая невязка хода.Рисунок 5. Положения ориентирных углов, невязок и знаков приращения в таблице.
- Выражение \(допf_{\beta}=1{}’\sqrt{n}\)– допустимая невязка.
- Применять выражение \(\Delta \beta =-f_{\beta}/n\) следует в том случае, если соблюдается условие \(f_{\beta}\leq допf_{\beta }\). При несоблюдении необходимо перепроверить исходные данные и предыдущие расчеты на предмет ошибок.
- Поправки в дальнейшем распределяют по измеренным углам и записывают в пункт 3, используя формулу:
\(\beta _{испр}=\beta _{изм}+\Delta \beta \)
- Обязательно соблюдение условия:\((\sum \beta _{изм}-180^{\circ}\cdot n)=\sum \beta _{теор}\)
- Рассчитывается значение дирекционных углов и заноситься в пункт 4: для левых:\(\alpha _{n+1}=\alpha _{n}+ \beta _{изм}-180^{\circ}\)правых:\(\alpha _{n+1}=\alpha _{n}+ 180^{\circ} – \beta _{изм}\)
- Вычисляются румбы (пункт 5) и знаки приращения координат (п. 7,9,11,13)
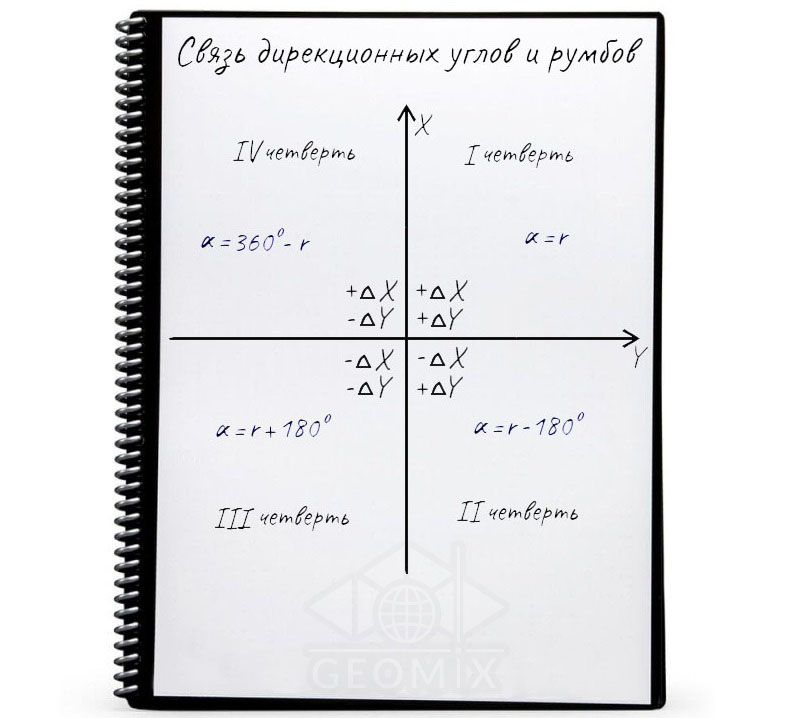
Рисунок 6. Взаимосвязь румбов и дирекционных углов
Порядок выполнения работ
Как и другие геодезические мероприятия, эта процедура проводится с предварительной подготовкой для получения точных метрических данных. Немаловажную роль играет также их математическая обработка. Сами работы выполняются по принципу от общего к частному и состоят из следующих этапов:
- Рекогносцировка местности. Оценка снимаемой территории, изучение ее особенностей. На этом этапе определяется местоположение снимаемых точек.
- Полевая съемка. Работы непосредственно уже на местности. Выполнение линейных и угловых измерений, составление абрисов, предварительные расчеты и внесение изменений при необходимости.
- Камеральная обработка. Завершающий этап работ, который заключается в вычислении координат замкнутого теодолитного хода и последующего составления плана и технического отсчета.
Рекогносцировка и полевые измерения выполняются непосредственно на объекте и являются наиболее трудоемкими и затратными мероприятиями. Тем не менее, от качества их проведения зависит дальнейший результат.
Обработка данных проводится уже в помещении. Сегодня она осуществляется при помощи специального программного обеспечения, хотя и ручные расчеты все также остаются актуальными и могут быть использованы геодезистом в целях проверки.
Обработка результатов
Поскольку разомкнутый ход представляет собой вытянутую ломаную линию, его обработка будет отличаться от вычислений, которые используют для замкнутого полигона. К тому же, изначально координаты и углы как минимум одной опорной точки уже известны.
Исходными данными для вычислений служат полученные во время съёмки:
– координаты исходных пунктов
– исходные дирекционные углы;
– измеренные углы и длины всех сторон.
Предварительные расчёты заключаются в азимутальной привязке начальной и конечной линии хода к его исходным направлениям, образованным пунктами ГГС (табл. 1)
Таблица 1. Вычисление дирекционных углов \(\alpha _{A1}\) и \(\alpha _{4D}\).
| \(\alpha _{A1}\) | \(\alpha _{4D}\) |
|
\(\alpha _{A1′}=\alpha _{AB}+\gamma _{1}\) \(\alpha _{A1}{}’=\alpha _{AC}+\gamma _{2}\) \(\alpha _{A1}{}’=0,5\left ( \alpha _{A1}{}’+\alpha _{A1}{}'{}’\right )\) |
\(\alpha _{4D}{}’=\alpha _{DE}-\gamma _{3}\pm 180^{\circ}\) \(\alpha _{4D}{}'{}’=\alpha _{DF}-\gamma _{4}\pm 180^{\circ}\) \(\alpha _{4D}=0,5(\alpha _{4D}{}’+\alpha _{4D}{}'{}’)\) |
Формула для определения горизонтального проложения через угол наклона:
\(d=Scos\nu \), где \(S\) – измеренная длина стороны; \(\nu\) – угол наклона измеренной стороны к горизонту.
Формула определения горизонтального проложения через превышение:
\(d^2=S^2 – h^2\)
Итоговые вычисления включают в себя:
– определение невязок и их распределение;
– вычисление длин сторон;
– расчёт угловых величин;
– определение координат пунктов;
Обрабатывается разомкнутый теодолитный ход поэтапно и с соблюдением контроля полученных результатов. В дальнейшем они заносятся в специальные таблицы установленной формы, иначе говоря – ведомость
Очень важно проводить контроль данных с допуском, чтобы результат был максимально достоверным

В теодолитном ходе измеряются не только горизонтальные углы (β), но и примычные (γ), а также расстояния S и углы наклона, при необходимости.
Следующим этапом будет обработка угловых данных, которую следует начать с вычисления сторон от начальной и до конечной линии:
\(\alpha _{1}=\alpha _{н}\pm 180^{\circ}\pm \beta _{1}\)
\(\alpha _{2}=\alpha _{1}\pm 180^{\circ}\pm \beta _{2}\)
___________________
\(\alpha _{2}=\alpha _{n-1}\pm 180^{\circ}\pm \beta _{n}\)
В приведенной выше формуле +β используют для левых по ходу углов, а –β – для правых.
– последовательность передачи дирекционных углов;
Сложив уравнение, получим для определения левых угловых величин выражение:
\(\alpha _{к}=\alpha _{н}\pm n180^{\circ}+\Sigma \beta \)
– для правых:
\(\alpha _{к}=\alpha _{н}\pm n180^{\circ}-\Sigma \beta \)
Чтобы убедится в качестве выполненных измерений необходимо определить угловую невязку. Для этого используется следующее выражение для правых угловых величин:
\(f_{\beta } = \Sigma _{\beta }-(\alpha _{н}-\alpha _{к})\pm 180^{\circ}\pm R\cdot 360^{\circ}\)
– для левых применяют формулу:
\(f_{\beta } = \Sigma _{\beta }-(\alpha _{к}-\alpha _{н})\pm 180^{\circ}\pm R\cdot 360^{\circ}\)
Выражение \( R\cdot 360^{\circ}\) используется в приведенных выше формулах с целью сокращения невязки полных кругов.
Далее происходит процедура определения допустимой невязки и введение поправок, что практически не отличается от вычислений в замкнутых ходах.
После их распределение выполняют уравнивание посредством введения поправок:
\(\nu _{\beta } = – \frac{f_{\beta }}{n}\)
При этом:
\(\sum \nu _{\beta }= -f_{\beta }\)
\(\beta _{испр}=\beta _{изм}+\nu _{\beta }\)
\(\nu _{\beta }\) – значение поправок;
Контроль уравнивание осуществляют таким образом:
– для левых углов:
\(\sum \beta _{испр}=(\alpha _{к}-\alpha _{н})\pm n180^{\circ}\pm R\cdot 360^{\circ}\)
– для правых:
\(\sum \beta _{испр}=(\alpha _{н}-\alpha _{к})\pm n180^{\circ}\pm R\cdot 360^{\circ}\)
В качестве контрольного значения выступает \(\alpha _{к}\), которое, при правильно выполненных вычислениях, должно равняться исходному:
\(\alpha _{выч}=\alpha _{исх}\)
Схема теодолитного хода
Каждый путь имеет определенную схему, по которой можно определить его вид и назначение, положение. Как говорилось ранее, каждая линия имеет свои отличительные признаки.
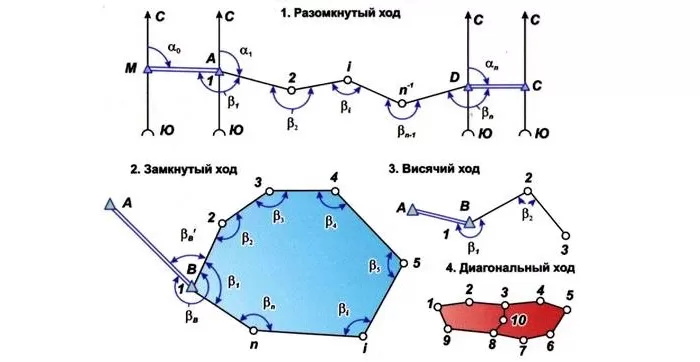
Замкнутая схема напоминает собой закрытую фигуру. Для того, чтобы огородить любой участок, нужно именно это построение.
Необходима только одна известная относительная точка, чтобы сделать замкнутое пространство. Так как линия состоит из множества координат, то нахождение углов не является проблемой. Схема напоминает многоугольник.
Висячий ход нужен для тех участков, которые еще находятся в проекте. Эта схема имеет единственную координату, так как конца у нее нет. Конец у данной линии свободен.
Разомкнутый план удобен тем, что координаты известны. Остается только вычислить необходимые углы по координатам.
Начало и конец на данной линии лежат на геодезических обоснованиях. Эта фигура любима многими геодезистами-новичками, которые только пришли в это дело, для них есть допустимая минимальная погрешность.
Назначение и основные разновидности
Проводится с целью точного отображения местности и расположенных на ней объектов на крупномасштабной карте, плане или специальных схемах.
Данная процедура подразумевает создание системы точек, закрепленных в натуре, и определение их горизонтальных углов при помощи теодолита или тахеометра. Расстояние между пунктами определяется при помощи светодальномеров, рулеток и других приборов, позволяющих обеспечить необходимую точность. По форме обычно принято различать следующие виды ходов:
– разомкнутый;
– замкнутый;
– висячий.
В разомкнутом первая и последняя точка базируется на разные пункты и направления геодезической сети, чьи координаты и дирекционные углы уже определены, а замкнутый образует геометрическую фигуру, поэтому может опираться только на один. Особенность же висячего хода состоит в том, что один его конец примыкает к пункту геодезического обоснования, а второй остается свободным.
Его форма во многом зависит от того, на какой территории проводятся измерения. Например, для автодорог и трубопроводов хорошо подойдет разомкнутый ход, а на строительных площадках и земельных участках обязательно должен быть построен замкнутый полигон.
Достаточно распространённой процедурой является прокладывание внутри больших полигонов дополнительных сетей, чтобы полностью отобразить ситуацию на плане.
Вычисление невязки в превышениях нивелирного хода
_______Невязка в геодезии показывает отклонение полученного на практике результата от его теоретического значения (fh), то есть для нивелирного хода, и вычисляется как:
_______Если нивелирный ход замкнутый, то
_______Если нивелирный ход разомкнутый, расположенный между двумя реперами с отметками HR1 и HR2, то
_______Допустимая невязка в превышениях нивелирного хода подсчитывается по формуле:
| , |
l
_______Для сильно пересеченной местности, когда приходится брать много иксовых точек и, соответственно, делать много станций, допустимая невязка вычисляется по формуле:
| , |
n
_______Невязка распределяется поровну на все превышения с противоположным знаком.
_______Контроль: Сумма исправленных превышений должна быть равна Σhтеор. После этого вычисляются отметки всех точек нивелирного хода.
Похожие записи:
 Выбираем сварочный аппарат для дачи: недорогой, но производительный
Выбираем сварочный аппарат для дачи: недорогой, но производительный
 Баня с электрокаменкой: строительство, отзывы, особенности
Баня с электрокаменкой: строительство, отзывы, особенности
 Кто построил московский кремль
Кто построил московский кремль
 Как правильно выбрать и установить фильтр аквафор морион
Как правильно выбрать и установить фильтр аквафор морион
 Как сделать вибростол для тротуарной плитки своими руками
Как сделать вибростол для тротуарной плитки своими руками
 Меловые маркеры: чем отличаются, как пользоваться и для чего нужны
Меловые маркеры: чем отличаются, как пользоваться и для чего нужны